

ربات بازرس مخازن و اهمیت آن در بازرسی غیرمخرب
اهمیت بازرسی غیرمخرب مخازن
بسیاری از صاحبان مخازن ذخیره، اهمیت بازرسی دیواره و کف مخازن برای تشخیص تخریب ناشی از عیوب و خوردگی را درک می کنند. در این خصوص از یک سو باید کیفیت بازرسی برآورده شود و از سوی دیگر باید ایمنی پرسنل تضمین شود. همچنین تمامی این بازرسی ها به این دلیل است که زمان و نحوه تشخیص عیوب به بهترین حالت ممکن برسد.
یک روش سنتی برای انجام بازرسی میزان تخریب ضخامت دیواره مخزن، اندازه گیری نقطه ای ضخامت دیواره اولتراسونیک با استفاده از دسترسی طناب یا داربست ساختمان است. امروزه این روش سنتی از نظر عملکرد بسیار سخت و نامناسب است و داده های جمع آوری شده در مورد عیوب نیز بسیار محدود است. در بسیاری از موارد نیز پیش زمینه هایی از جمله عدم بکارگیری و معلق کردن فعالیت مخزن مورد نیاز است. به همین دلیل، استفاده از ربات و خزنده بازرسی مخزن با ویژگی های طراحی منحصر به فرد و سرعت بازرسی بالا جهت بازرسی دیواره و کف مخازن بسیار کاربردی تر است.
بیشتر بخوانید : غلبه بر چالش های بازرسی و اندازه گیری ضخامت در دمای بسیار بالا
ربات بازرس مخازن دسترسی از راه دور، بازرسی سریع و همچنین ارائه داده های با کیفیت بالا را امکان پذیر می کند. در این روش به دلیل بررسی تعداد زیاد نقاط در هر مسافت داده های حاصل شده مورد اطمنیان تر بوده و در نتیجه گزارش بازرسی با کیفیت تر است.
چرا بررسی نقطه ای دیواره یا کف مخزن برای تشخیص خوردگی کافی نیست؟
پیشبینی چگونگی و مکان خوردگی (corrosion) روی دیوارهها و کف مخازن بسیار دشوار است. این پیش بینی تحت تأثیر پارامترهای زیادی مانند محتویات مخزن، محیط، شرایط آب و هوایی، میزان بارگیری و تخلیه و بسیاری موارد دیگر قرار دارد. بنابراین، دریافت داده های تشخیصی عالی و معرف در بخش های بزرگی از سطح مخزن حیاتی است.
این امر با بررسی های نقطه ای امکان پذیر نیست زیرا بررسی نقطه ای صرفا تعداد محدودی از نقاط داده را در یک خط اسکن اندازه گیری فراهم می کند. این خطوط اسکن (scanlines) در دستورالعمل های بازرسی مانند EEMUA 159 یا API 653 توضیح داده شده است.
خوردگی می تواند بسیار موضعی باشد و خود را در الگوهای خوردگی افقی نشان دهد. (همانطور که در شکل 1 نیز مشاهده می شود)
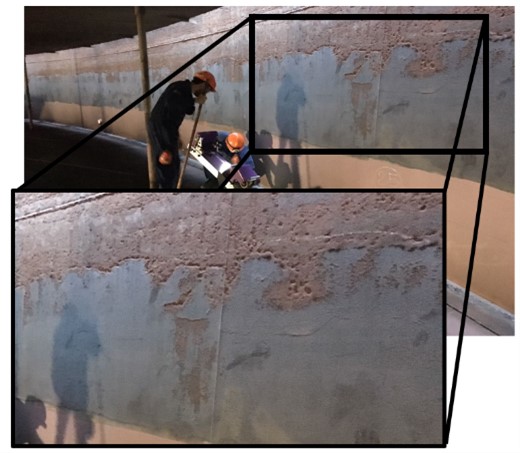
شکل 1: الگوی خوردگی مخزن
در این حالت، الگوی خوردگی در اطراف محیط مخزن در قسمت پایینی 20 تا 30 سانتی متر (8 تا 12 اینچ) زیر جوش گسترش می یابد. هنگامی که بررسی های نقطه ای حین کار در قسمت بیرونی مخزن انجام می شود، احتمال عدم تشخیص عیوب قابل توجه خواهد بود.
یک ربات یا کراولر بازرس مخزن مانند کراولر بی اسکن Scorpion 2 شرکت ادیفای یا ربات بازرس مخزن سی اسکن آلتراسونیک شرکت مهندسان پایش وضعیت امیرکبیر C-MAP می تواند نقاط خوردگی کوچک را شناسایی و ثبت کند.
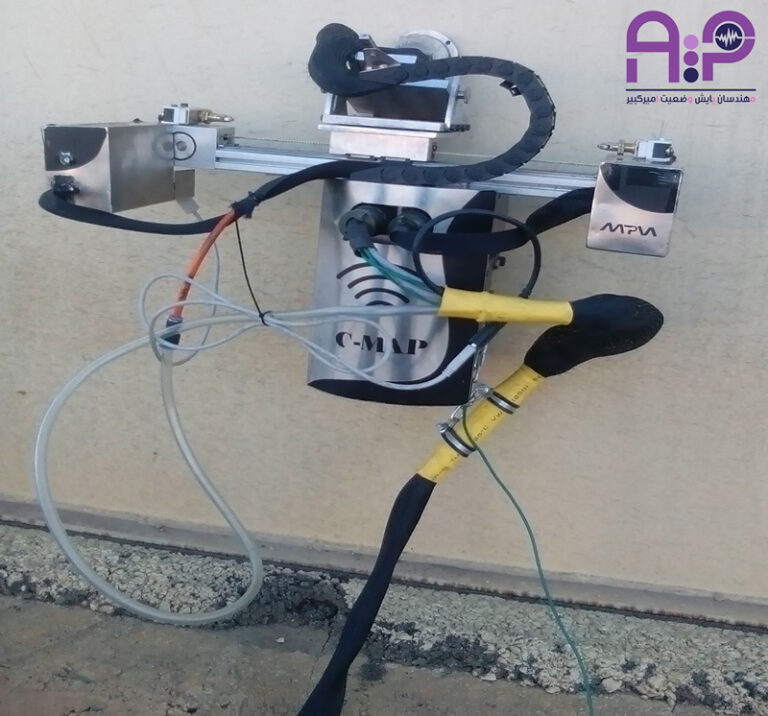
ربات بازرس مخازن و خطوط لوله شرکت مپوا (C-MAP)
اگر عیوب در تمام خطوط اسکن ذخیره شده در اطراف سطح مخزن دیده شوند، الگوی خوردگی نیز تشخیص داده می شود. پس از یافتن عیوب، می توان تصمیم گرفت که آیا بازرسی را با یک سیستم داده بازرسی متراکم تر مانند اسکنر شطرنجی RMS PA نیاز است یا خیر ؟

شکل 2: Scorpion 2 در حال انجام بازرسی مخزن
بازرسی غیر مخرب سلامت مخازن توسط ربات بازرس مخازن
ربات بازرس مخزن نه تنها یک اسکن کامل از ضخامت دیواره و کف مخزن ارائه می دهد، بلکه این کار را بسیار کارآمدتر از هر روش بازرسی دیگری انجام می دهد.
یکی از دلایل این امر این است که مثلا ربات بازرس مخزن شرکت ادیفای می تواند 180 میلی متر (7 اینچ) در ثانیه را بازرسی کند. این بدان معنی است که در یک مخزن 22 متری (72 فوتی)، یک اسکن لاین حدود دو دقیقه طول می کشد.
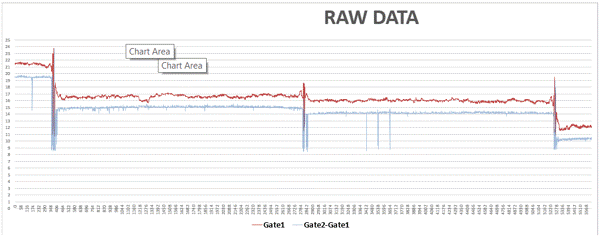
از آنجایی که ربات بازرس مخزن، داده ها را در هر 1 میلی متر (0.04 اینچ) جمع آوری می کند، در مجموع 22000 نقطه داده برای ارزیابی وضعیت ضخامت دیوار موجود است. همانطور که در شکل 3 میبینیم، داده های ارائه شده در نمودار اکسل به وضوح نشان می دهد که چگونه ضخامت دیواره مخزن در امتداد محور عمودی مخزن توزیع می شود.
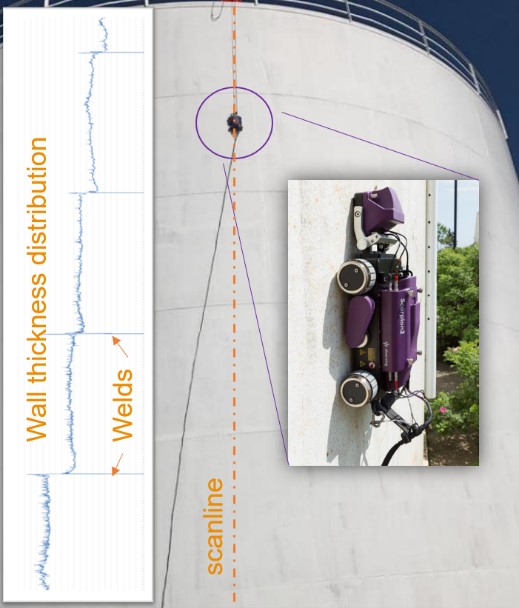
شکل 3: تنظیمات و داده های اسکن بازرسی ربات بازرس مخازن
جمع آوری داده ها از راه دور B-scan
همانطور که قبلا ذکر شد نمونه ای از این ربات های بازرس مخزن، ربات Scorpion 2 شرکت ادیفای است که ما آن را یک ربات بی اسکن B-Scan می نامیم. دادههایی که در ابزار Swift-UT نمایش داده شده و ذخیره میشوند شامل دادههای اسکن A و فراداده ها مانند تنظیمات گیت و مقادیر گیت است.
دو راه برای ارائه این داده ها وجود دارد: در قالب خام مانند خود A-scan و همچنین داده های B-scan که خلاصه ای از تمام اسکن های A در یک اسکن است. در اینجا می توانیم ارزیابی کنیم که آیا نقطه اندازه گیری بر اساس موقعیت و حالت آن هنگام عبور از گیت معتبر است یا خیر.
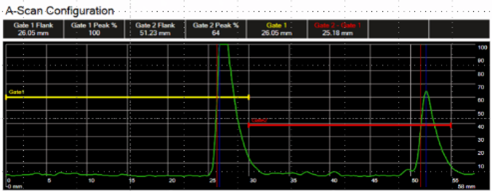
شکل 5: نمودار A-scan
یک B-scan پاسخ های سیگنال اولتراسونیک UT را برای همه داده های A-scan جمع آوری شده در یک نما نمایش می دهد. مزیت نمای B-scan این است که هر گونه عیب در اندازه گیری ضخامت دیوار به راحتی قابل شناسایی است. همچنین تاکید می کند که آیا پاسخهای تکراری دوم یا احتمالاً بیشتر (پژواک) در دسترس هستند یا خیر؛ که این امر امکان پذیر بودن تفسیر داده های گیت دوم را نشان میدهد.
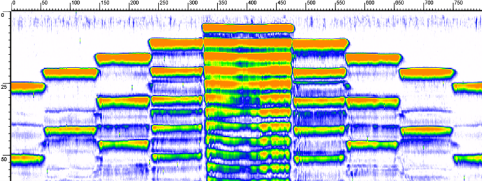
شکل 6: نمودار B-scan
بهره وری بالاتر در گزارش های ربات بازرسی مخازن
وجود و استفاده از گیت دوم می تواند در ارزیابی واقعی سلامت دیواره مخزن مفید باشد. مقادیر گیت اول می تواند تحت تأثیر پوشش مخزن قرار گیرد؛ فلذا مقادیر گیت دوم دقیق تر در نظر گرفته می شوند زیرا اثرات رنگ در مقدار گیت دوم وجود ندارد.
یک اسکن لاین بازرسی مخزن شامل داده های میلی متری از ارزیابی یکپارچه مخزن است. همان مخزن 22 متری (72 فوت) با 22000 نقطه داده را از نمونه قبلی در نظر بگیرید. بر اساس قطر مخزن، می تواند 8 تا 16 اسکن برای هر بازرسی مخزن وجود داشته باشد.
همانطور که گفته شد، تلاش می شود تا داده ها در هر دو گیت 1 و گیت 2 جمع آوری شود تا اثرات ضخامت رنگ حذف گردد.
در مورد بازرسی مخزن با 8 اسکن لاین با 22000 نقطه در هر اسکن، 8 اسکن لاین در 2 مقدار گیت ضرب می شود تا برابر با 352000 نقطه خواندن ضخامت باشد. گزارش این حجم از داده می تواند یک چالش باشد. برای غلبه بر این مشکل، شرکت ها یک ماکروی اکسل ایجاد می کنند که دادهها را خلاصه و گزارش مفصلی تولید میکند.
گزارش داده های بازرسی با استفاده از ماکرو در اکسل
اگر بخواهیم داده های را در قالب های غیر گرافیکی مانند A-scan یا B-scan تفسیر کنیم، باید هزاران نقطه داده را به صورت دستی مرور کنیم. این فرآیند زمان بر و بسیار پر خطا خواهد بود.
بهترین رویکرد، خلاصه کردن داده ها در موارد مورد نظر است. این منطقه های مورد نظر را می توان با موقعیت های چک نقطه ای که در غیر این صورت جمع آوری می شد مقایسه کرد. تفاوت اصلی در اینجا این است که این موارد حاوی حداقل، میانگین و حداکثر ضخامت واقعی برای آن نقطه خاص است. این تفاوت تضمین می کند که نقاط خوردگی احتمالی را از دست ندهید.
از آنجایی که هنگام حرکت ربات خزنده به بالای دیواره یا کف مخزن مقدار قابل توجهی داده جمع آوری می شود، داده های غیر معتبر نیز جمع آوری می شود. داده های غیر معتبر معمولا به دلیل قطع سیگنال ایجاد می شوند. این قطعی های سیگنال میتواند ناشی از عوامل متعددی مانند کم شدن رنگ، ضایعات، اتصال ضعیف سیگنال و غیره باشد.
ماکروی اکسل از تنظیمات خاصی برای خروجی گرفتن از داده ها در قالب اکسل استفاده می کند. این خروجی داده در فایل ماکرو خوانده می شود. اولین کاری که کاربر باید انجام دهد شناسایی محل جوش ها در داده های جمع آوری شده است. به این ترتیب، ماکرو می داند که کدام پارامترها مخزن برای آن بخش داده معتبر هستند. پس از اتمام کار، کاربر می تواند پارامترهای هر بخش را همانطور که در شکل 7 مشاهده می شود، در تب تنظیمات وارد کند.
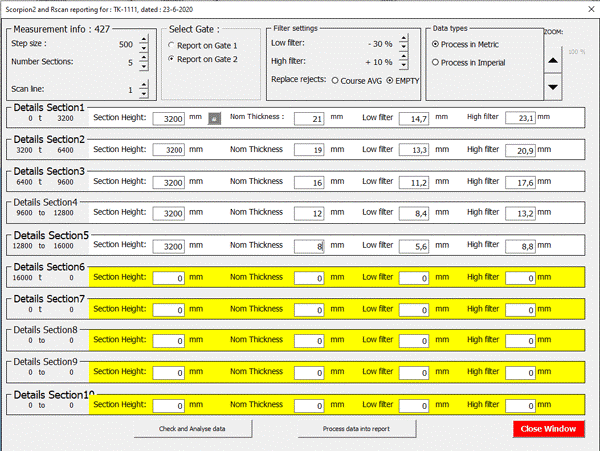
شکل 7: تنظیمات گزارش اکسل ربات بازرسی مخازن
در برگه تنظیمات، کاربر می تواند هر بخش را برای خلاصه کردن داده ها تنظیم کند. کاربر همچنین می تواند تعیین کند که داده های گیت 1 یا گیت 2 برای نمودارهای توزیع ضخامت دیوار در دسترس هستند یا خیر. ماکرو به کاربر این امکان را می دهد که یک محاسبه عمومی فیلتر کم و زیاد را بر اساس ضخامت اسمی هر دوره وارد کند. تنظیم مورد نیاز برای هر دوره مخزن ارتفاع مقطع، ضخامت اسمی و فیلترهای بالا و پایین است. هنگامی که این اطلاعات شناخته شد، کاربر می تواند داده ها را در یک برگه خلاصه پردازش کند.
شکل 8: داده های پردازش شده بازرسی مخزن
از برگه خلاصه، داده ها به فرمت گزارشی که کاربر می تواند ایجاد کند پیوند داده می شود.
با گزینه هایی که برای ذخیره و خروجی گرفتن از گزارش ها وجود دارد (مثلا به صورت PDF یا چاپ آن)، کاربر روش های متعددی برای به اشتراک گذاشتن گزارش نهایی بازرسی مخزن را دارد.
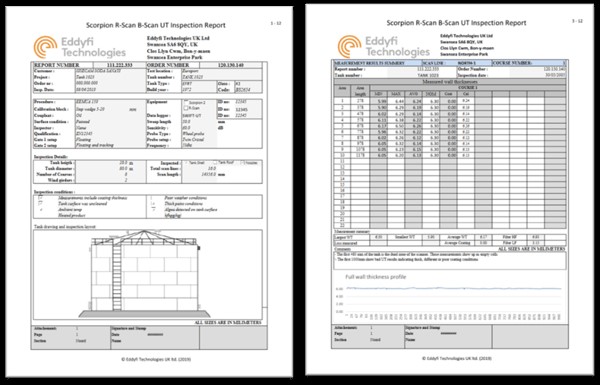
شکل 9: گزارش بازرسی نهایی مخزن قابل تنظیم توسط کاربر
اگر علاقه مند به کسب اطلاعات بیشتر در مورد روش های بازرسی بسیار پربازده برای بازرسی بهتر مخازن هستید، میتوانید با کارشناسان تست های غیرمخرب NDT شرکت مپوا در تماس باشید.

شکل 10 : ربات خزنده Scorpion 2 شرکت ادیفای در حال بازرسی مخازن









